ld ueblo ngineering enter
Founded 2006 in Tucson, AZ. to explore Human/Robot Interactivity
“Drilling Brains for a New & Better Use of Technology”
Patents Pending
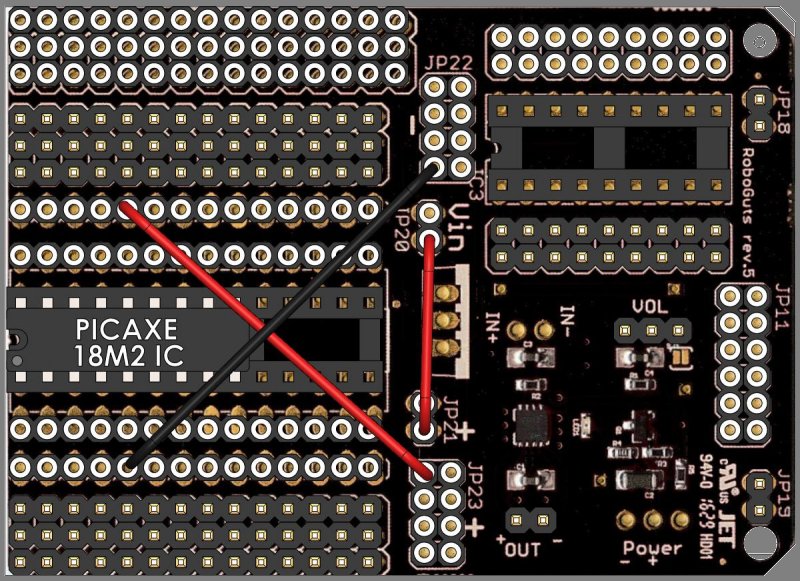
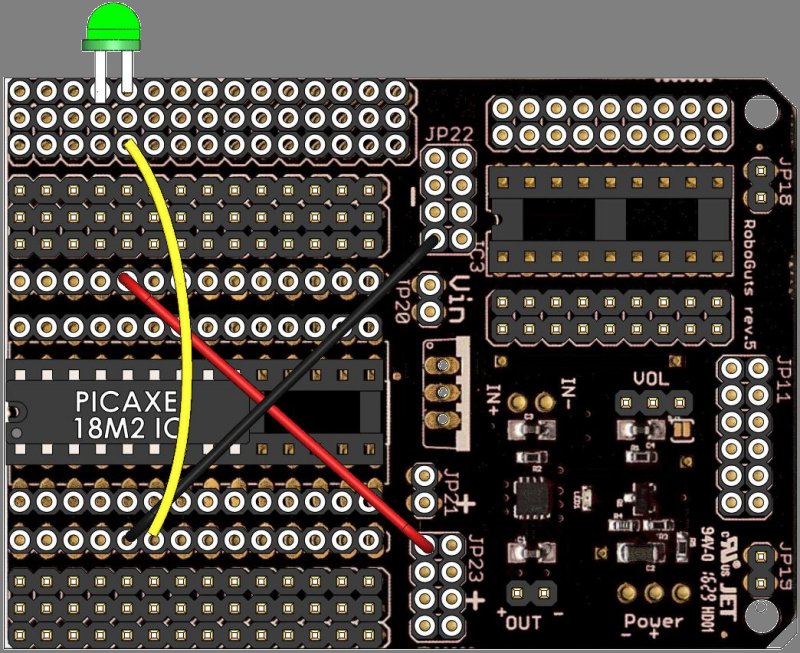
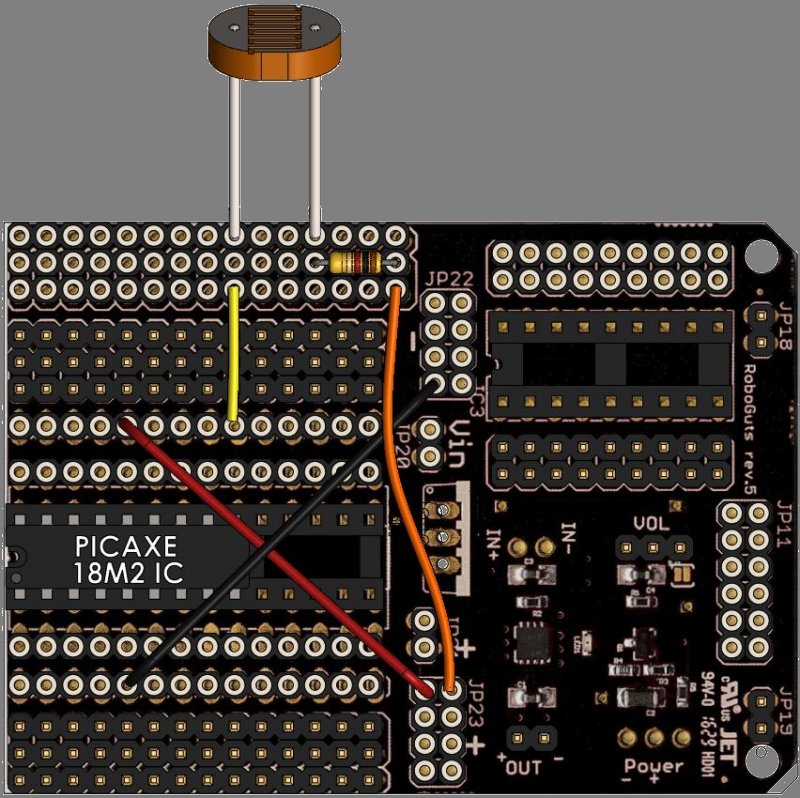
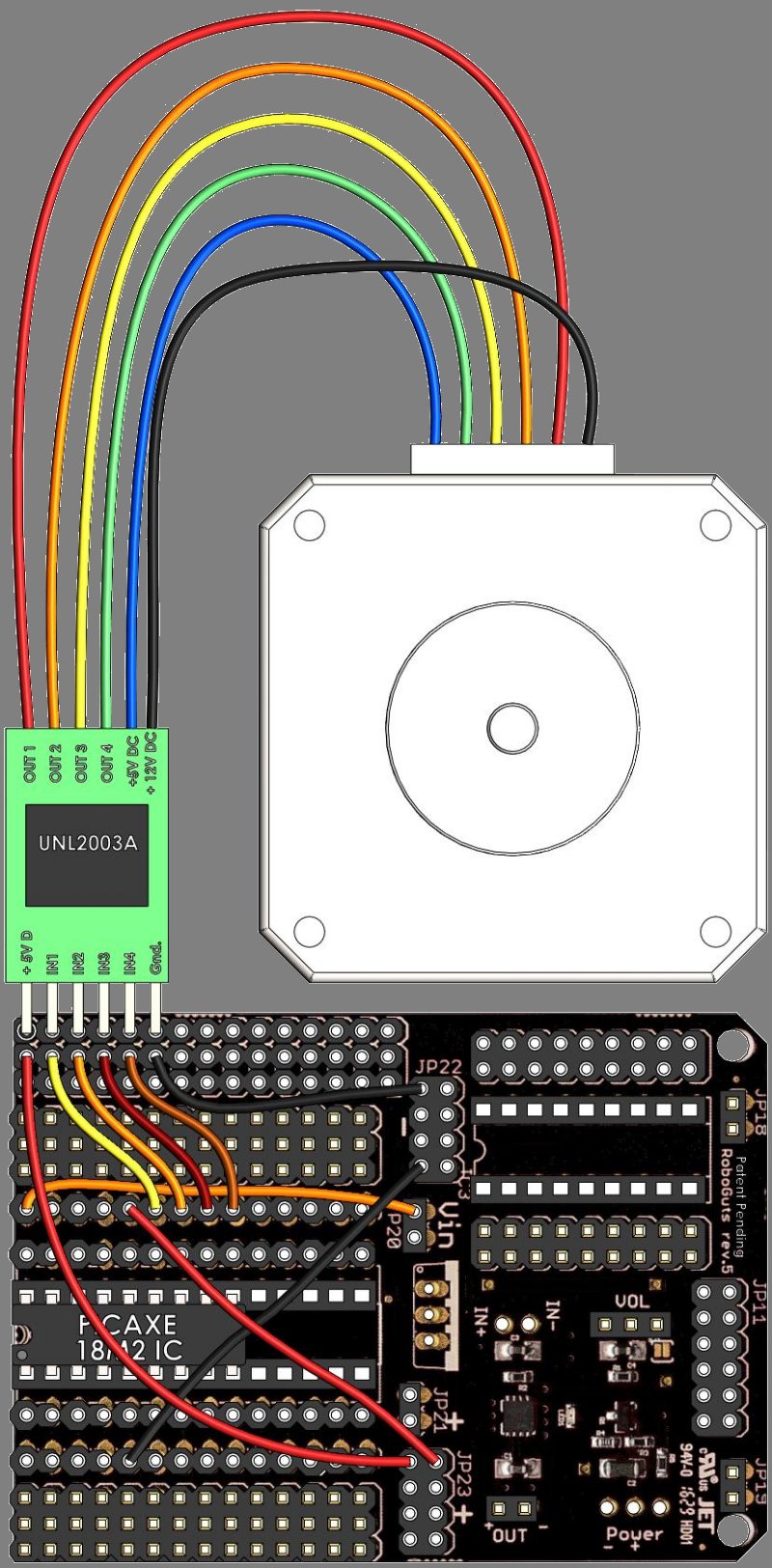
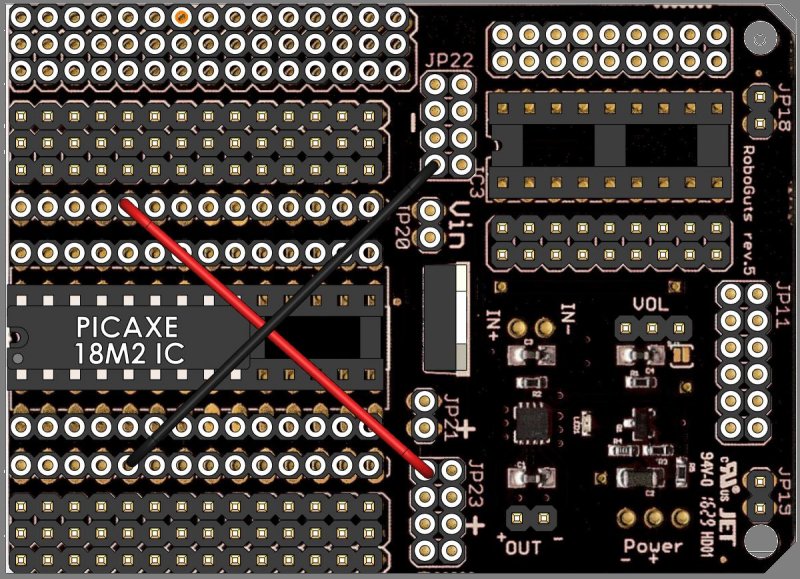
Experiment 00 Power IN
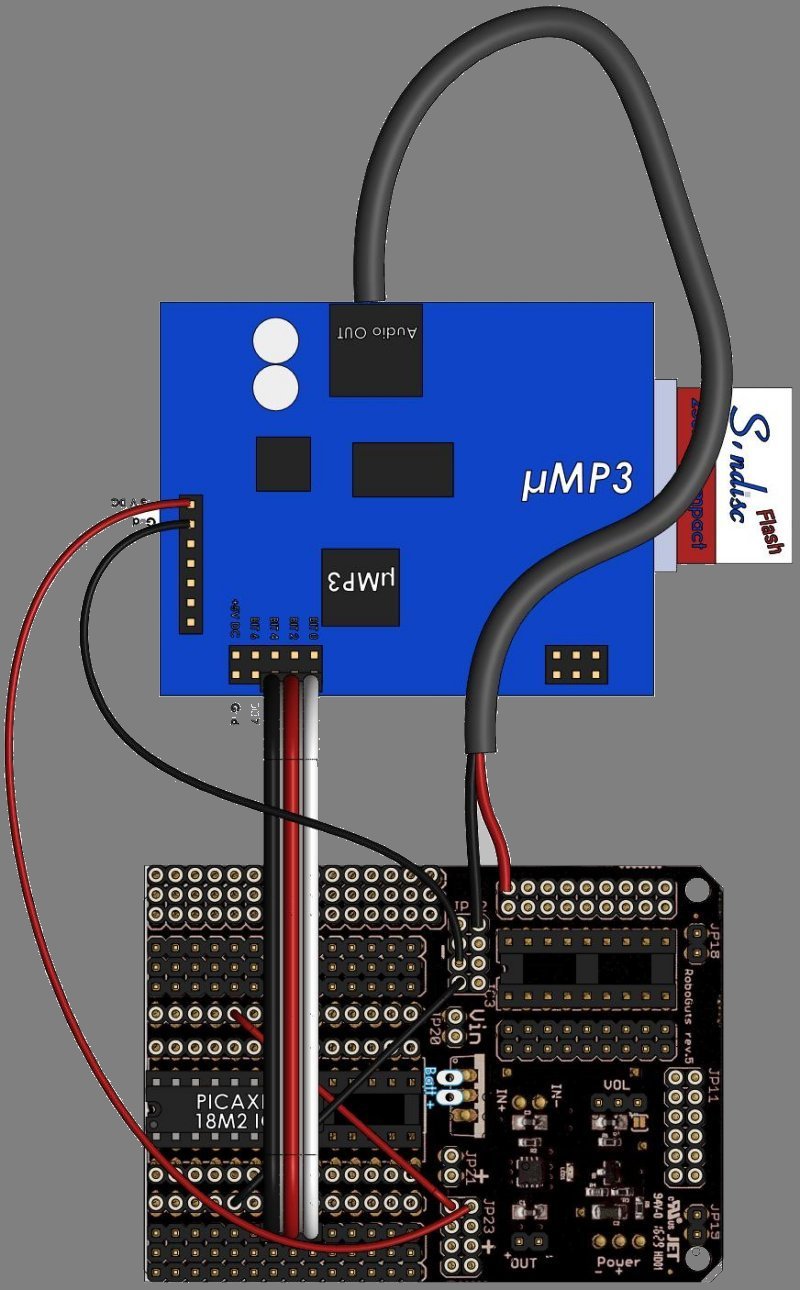
JP20 is tied directly to the Battery IN V+/Vin male header top left of RoboGuts™ circuit board above JP18
Power IN for the PICAXE 18M2 chip is 5V DC
PICAXE Manual1.PDF
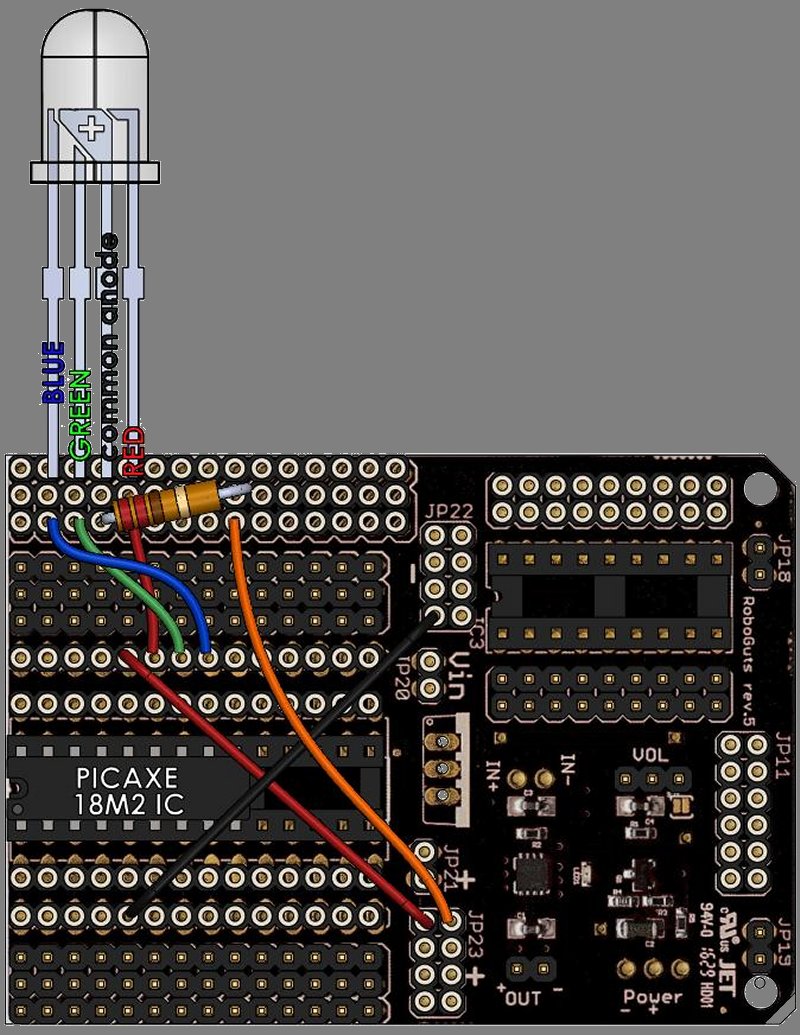
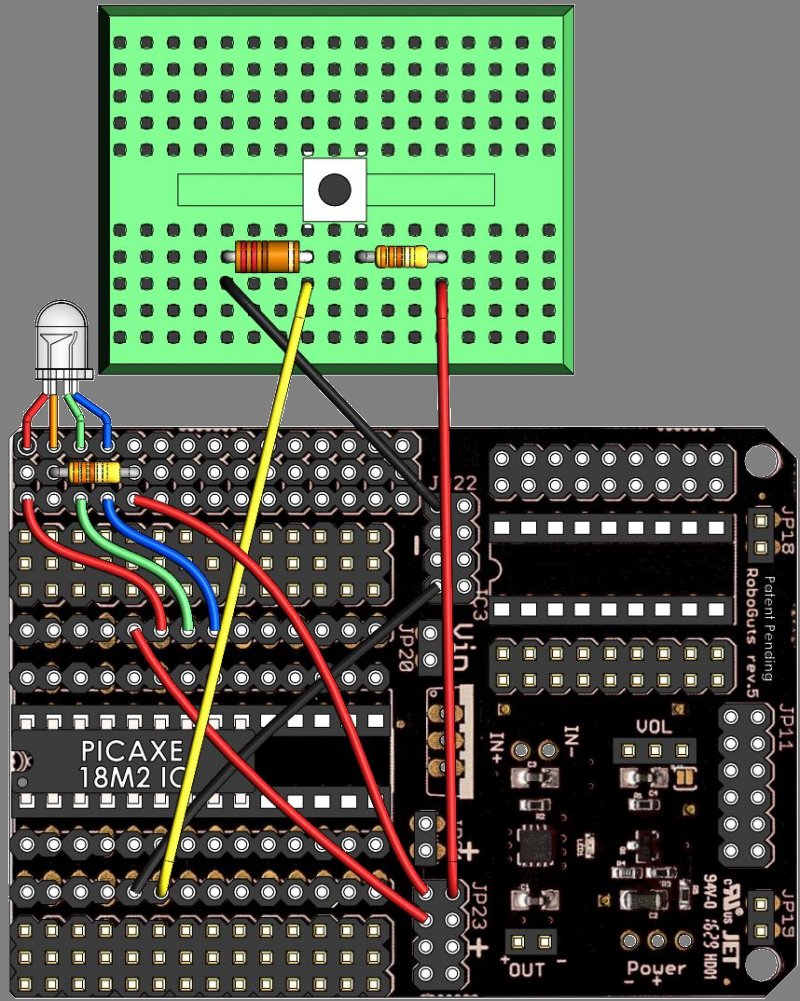
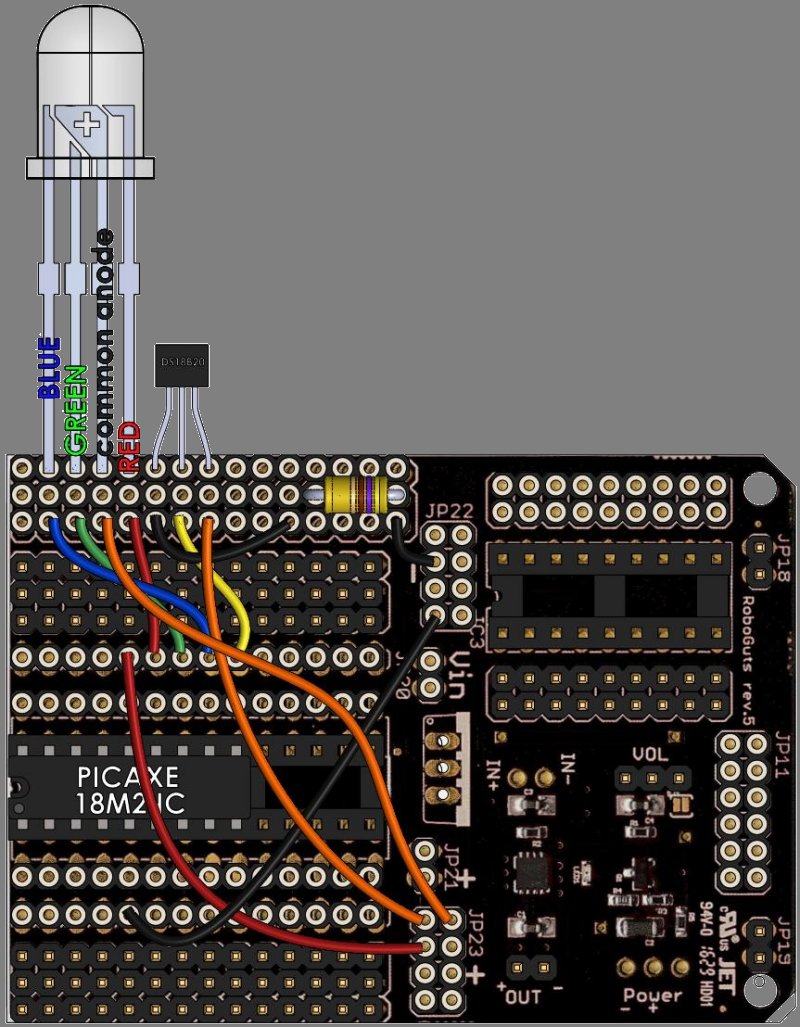
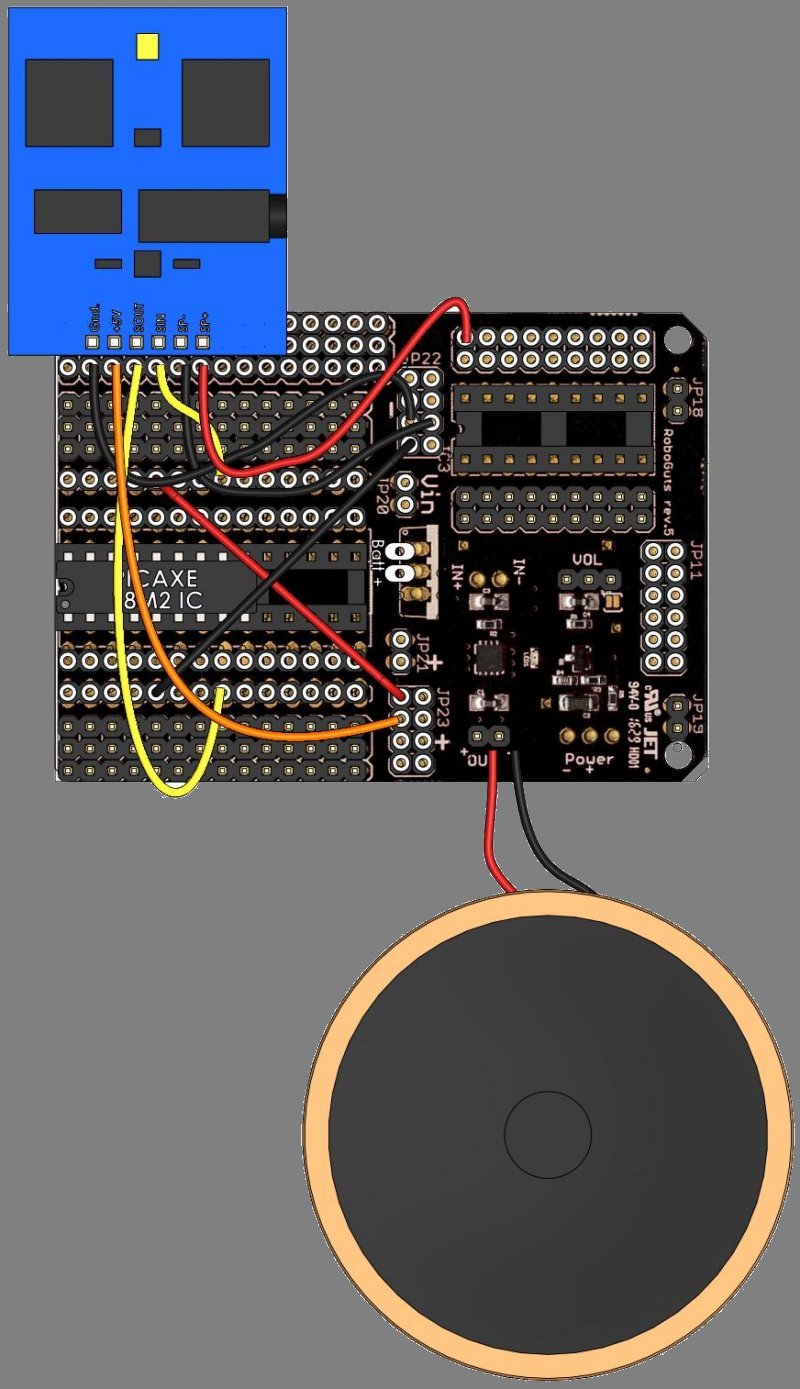
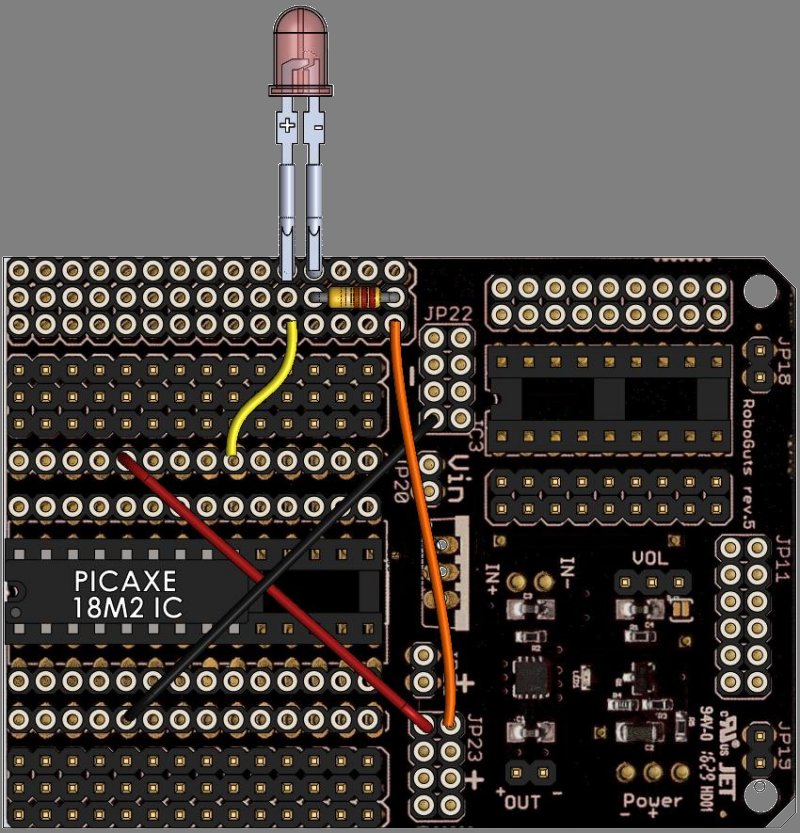
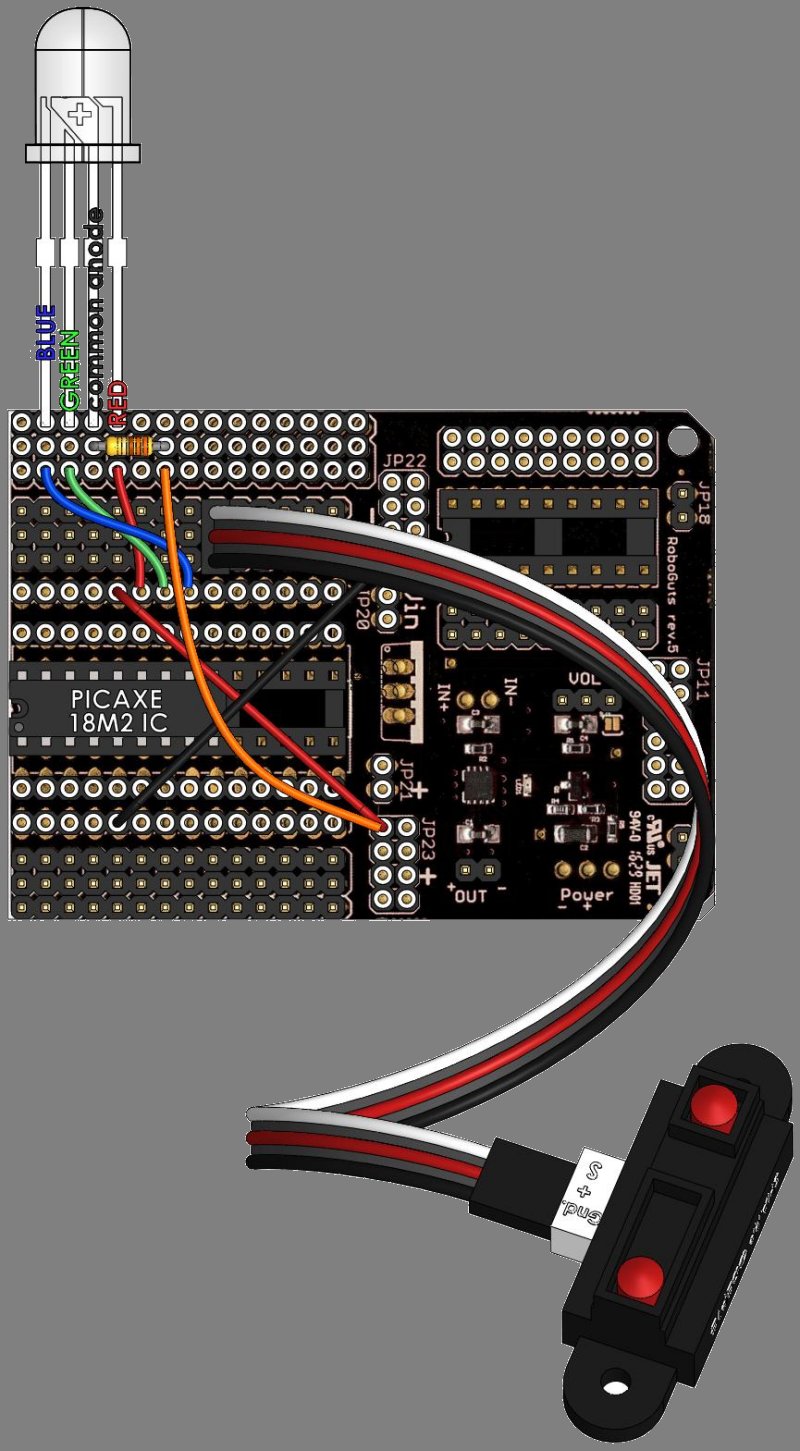
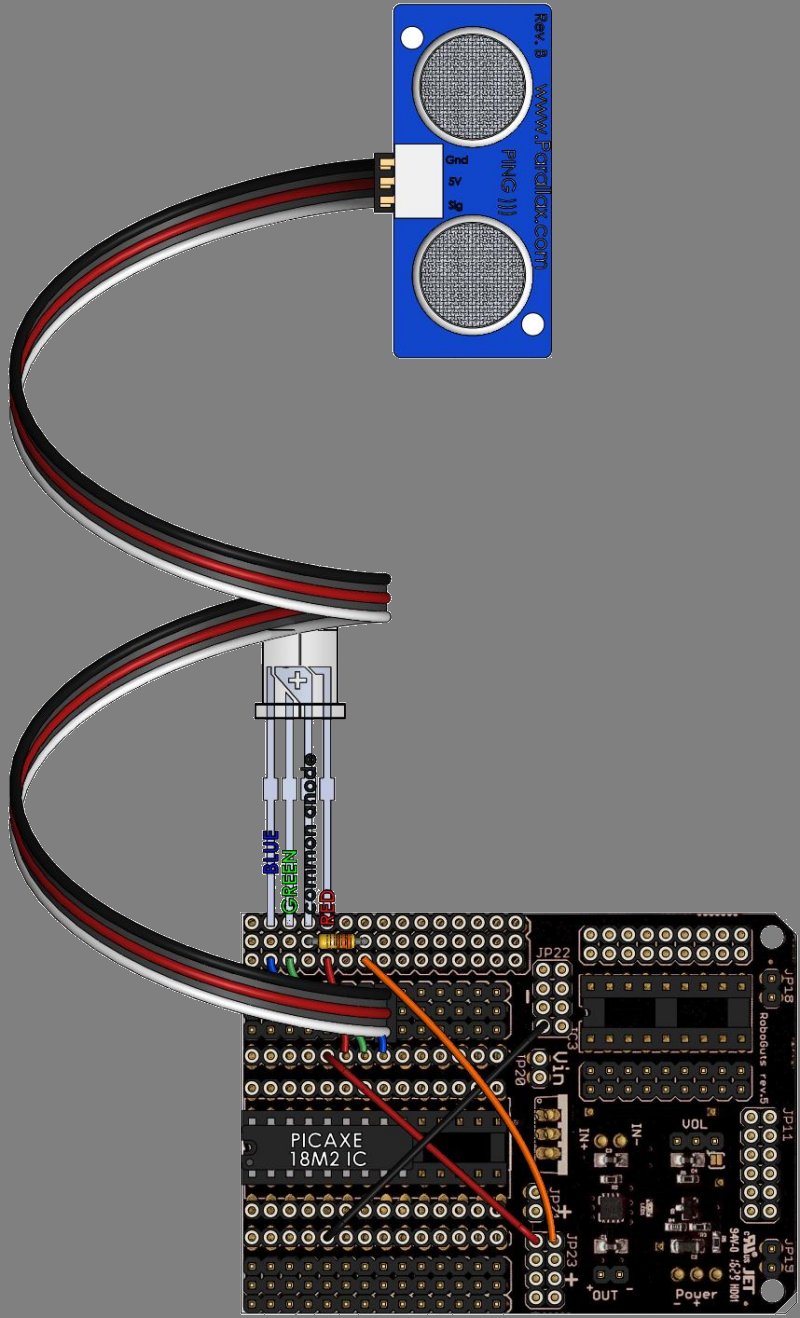
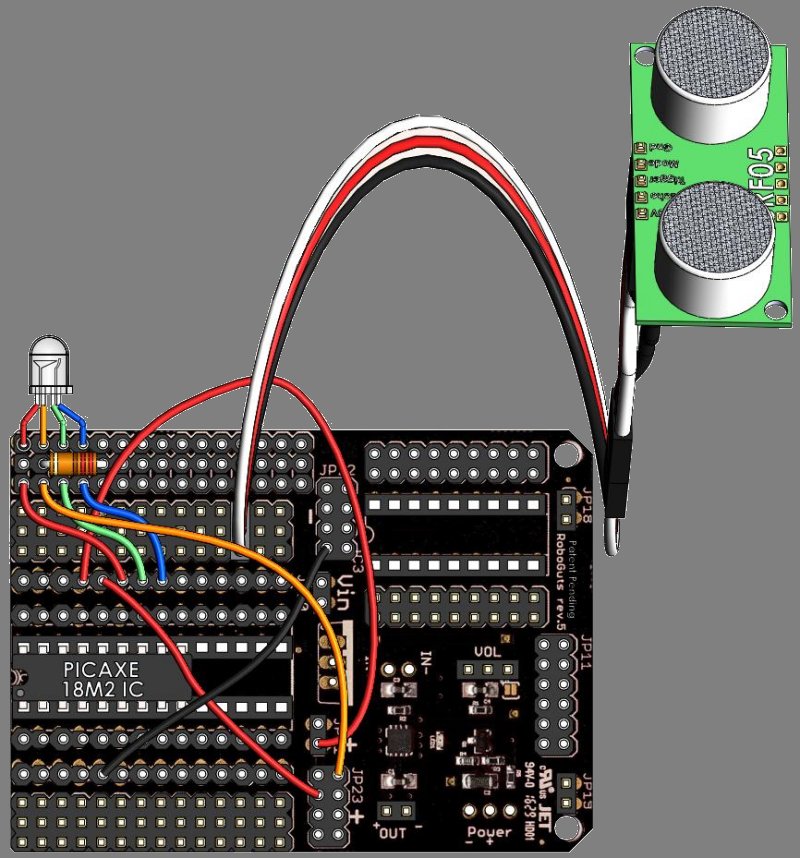
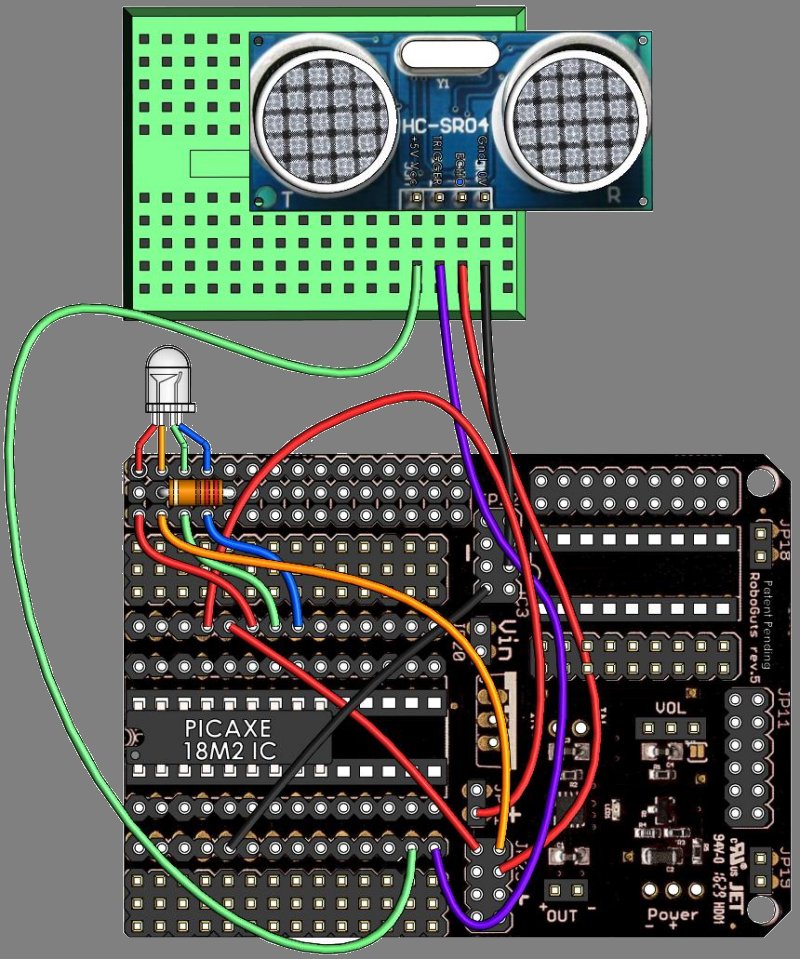
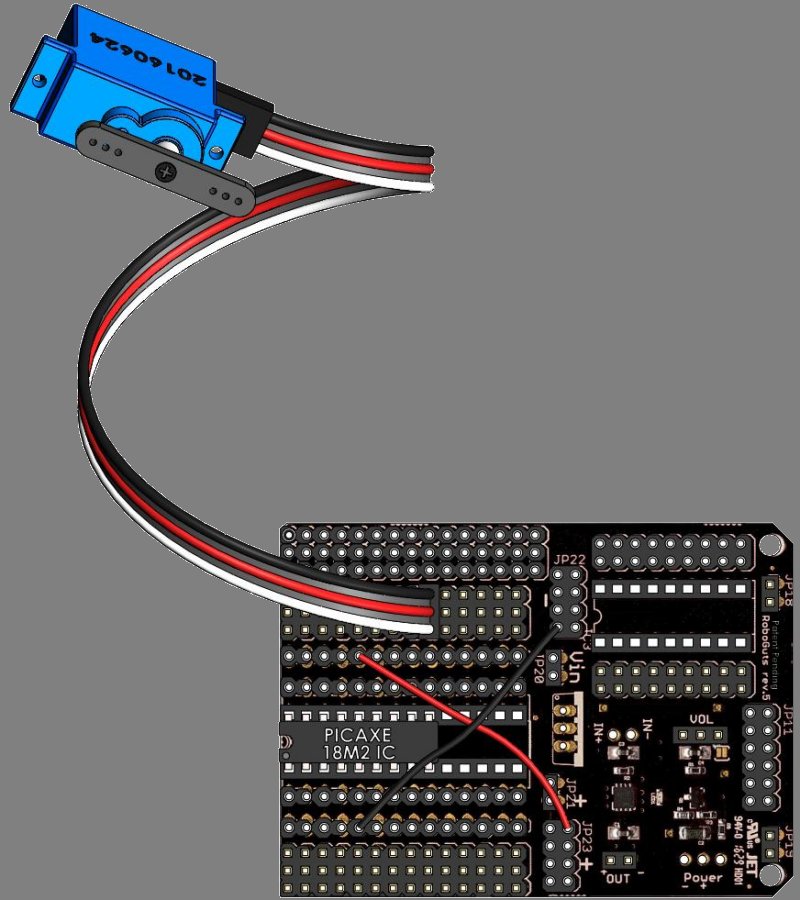
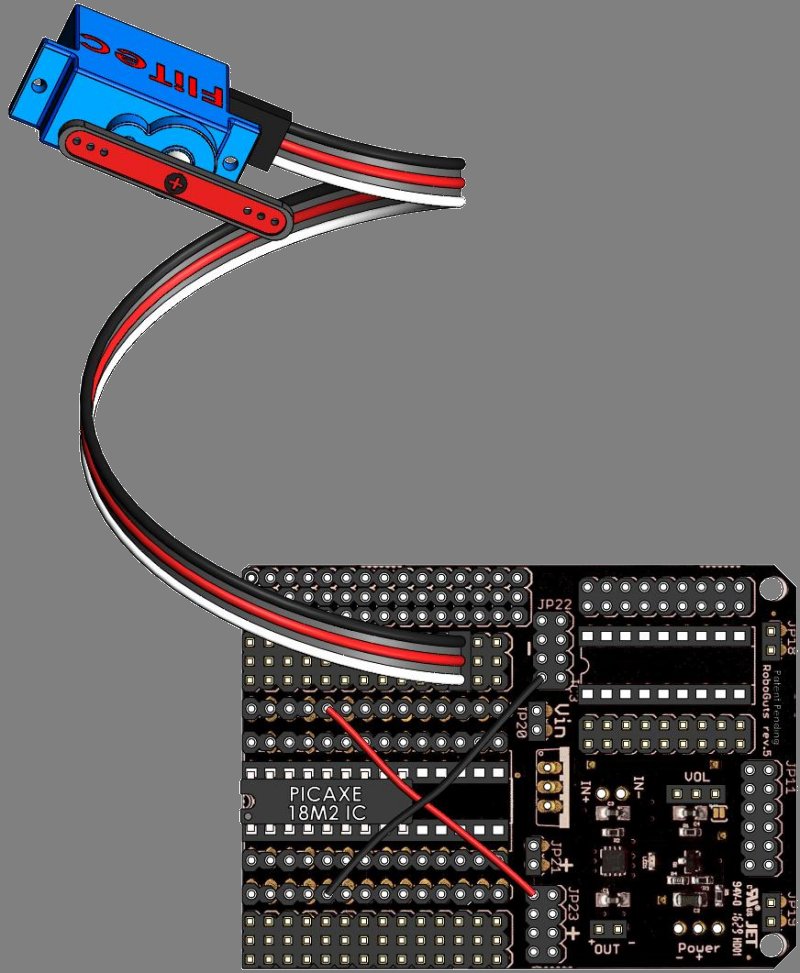
B.0 = RWheel, B.1 = LWheel B.7 = Red LED, B.6 = Green LED, B.5 = Blue LED C.0 = Talk & Song
----------------------------------------------------------------------------------------------------------------
ALL the .STL part files are waiting for KickStarter campaign to be funded.
----------------------------------------------------------------------------------------------------------------
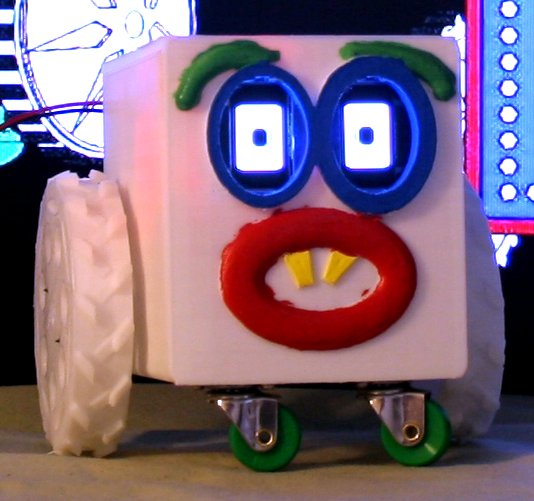
Project X1 = Cave Explorer miniFloppyBot
Body box, 2 Wheels, Top, Skid and Face ... the whole kit can be 3D printed on most printers in one day.
Only 1 rubber band on 1 wheel for traction is why the bot
falters a little in the normal programmed operation,
but it is easily seen how the program works in the demo video.
ScardyBot ... Turns to Run Away
increase the turn radius of X0 closer to 180° to run away
ScardyBot ... Turns to Run Away
increase the turn radius of X0 closer to 180° to run away
Flip the direction and now you have a Psuedo SumoBot that goes after whatever is close!
Finds something in range and tries to stick to it like a poopie on your shoe!
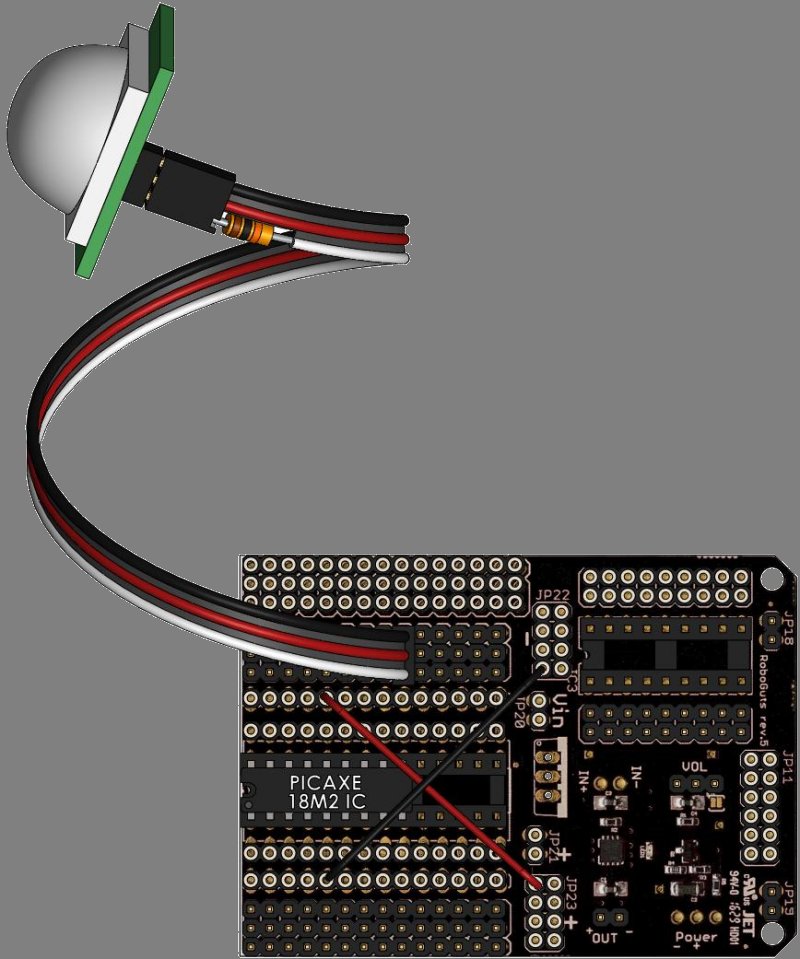
Project X2 = PIXYbot
The PIXYbot is a miniFloppyBot with a RoboGuts™ and a PIXY CMUcam5.
The bot sees a color, displays the color in its body 3-color LED and speaks about the color it sees.
. . . . . . . . . .
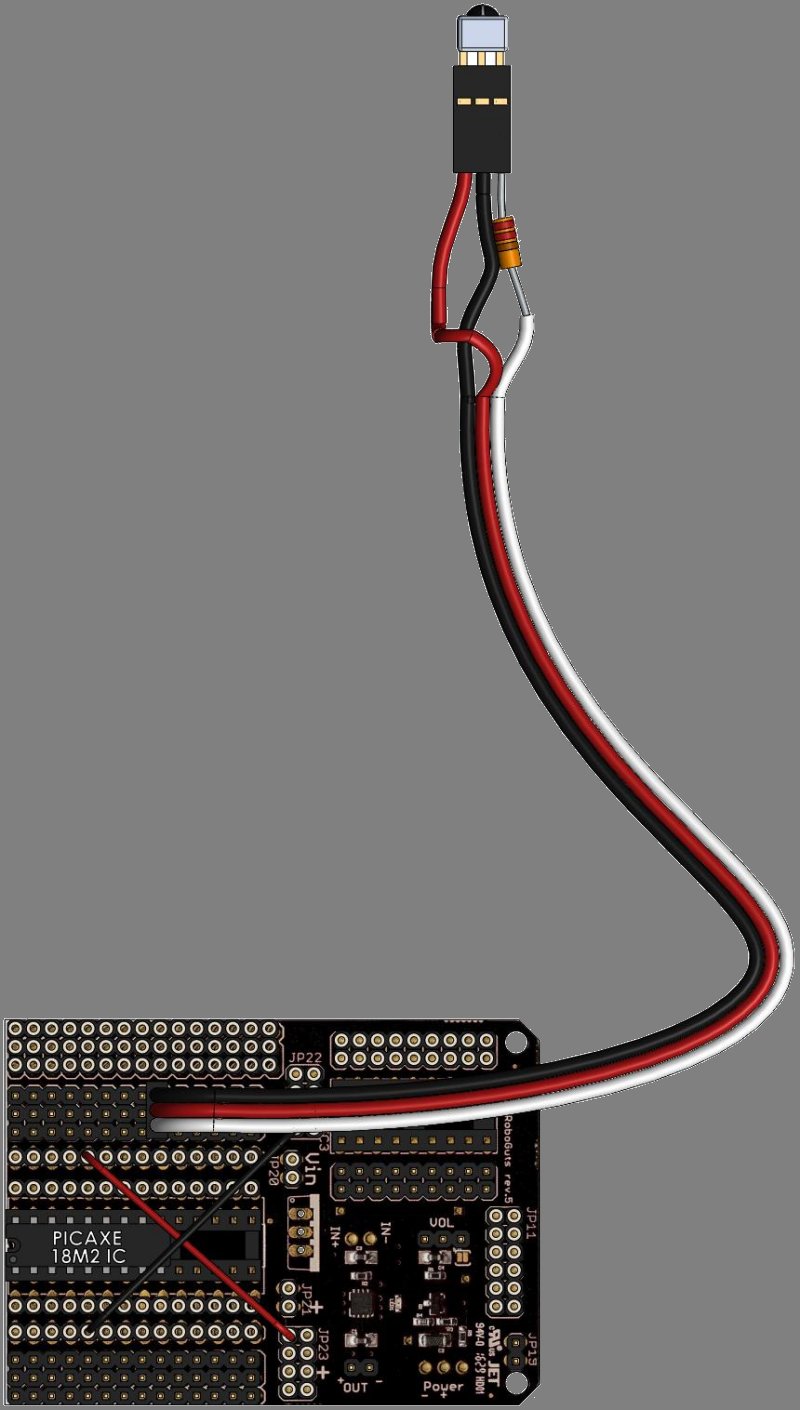
The one caveat to this is you need to have good lighting and bright colors for this sensor to see and
. . . . . . . . . .
recognize colors correctly. Color lights and bacck-lit objects do not work with the PIXY CMUcam5.
Project X3 = Skully ... The Head of the Grim Reaper
A Skull that moves its Jaw and Turns its Neck while it Talks
----------------------------------------------------------------------------------------------------------------
ALL the .STL part files are waiting for KickStarter campaign to be funded.
----------------------------------------------------------------------------------------------------------------
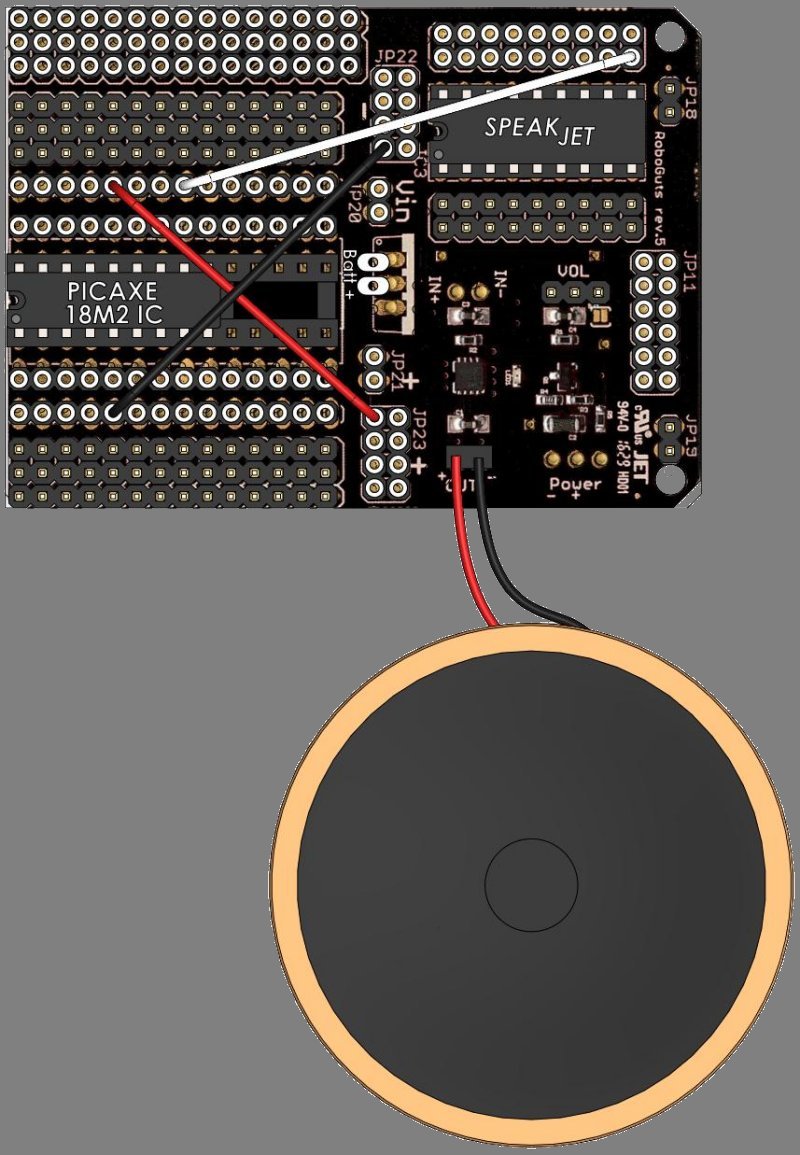
Easy to build other than painting the parts and soldering up the audio amplifier PINs.
The RoboGuts™ are so simple!
B.0 = Neck, B.1 = RArm, B.2 = LArm, B.3 = RWheel, B.4 = LWheel
B.7 = Red LED, B.6 = Green LED, B.5 = Blue LED
C.0 = Talk & Song
----------------------------------------------------------------------------------------------------------------
ALL the .STL part files are waiting for KickStarter campaign to be funded.
----------------------------------------------------------------------------------------------------------------
Project X5 = Build a miniFloppyBot with OLED Eyes
Designed for the PICAXE 28X2 module with enough memory for all the movements, although smaller chips can still make movable eyes.












{kind=link}